Projekt IoT: Difference between revisions
| (61 intermediate revisions by 2 users not shown) | |||
| Line 17: | Line 17: | ||
=== ATTiny === | === ATTiny === | ||
Most ATTinys: https://github.com/SpenceKonde/ATTinyCore | |||
Datasheet 2313: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-2543-AVR-ATtiny2313_Datasheet.pdf | * Datasheet 2313: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-2543-AVR-ATtiny2313_Datasheet.pdf | ||
Datasheet 2313 Summary: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-2543-AVR-ATtiny2313_Summary.pdf | * Datasheet 2313 Summary: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-2543-AVR-ATtiny2313_Summary.pdf | ||
* Pinout 2313: https://github.com/SpenceKonde/ATTinyCore/blob/master/avr/extras/Pinout_x313.jpg | |||
==== Wiring ==== | ==== Wiring ==== | ||
| Line 33: | Line 34: | ||
I have an USBasp. Program with avrdude. Works integrated in Arduino IDE. | I have an USBasp. Program with avrdude. Works integrated in Arduino IDE. | ||
Ignore warning "avrdude: warning: cannot set sck period. please check for usbasp firmware update.". | |||
Numbering of Connector is | Numbering of Connector is | ||
| Line 43: | Line 45: | ||
New chip needed 0.5MHz for correct timing with delay() | New chip needed 0.5MHz for correct timing with delay() | ||
Needed this | Needed to add this udev rule | ||
SUBSYSTEMS=="usb", ATTRS{idVendor}=="16c0", ATTRS{idProduct}=="05dc", GROUP="dialout", MODE="0660" | echo 'SUBSYSTEMS=="usb", ATTRS{idVendor}=="16c0", ATTRS{idProduct}=="05dc", GROUP="dialout", MODE="0660"' | sudo sh -c 'cat >/etc/udev/rules.d/50-USBasp.rules' | ||
=== Digistump === | |||
=== ESP8266 === | or compatible board with ATTiny85 and USB (P0-P5 and 5V/Gnd/Vin broken out) | ||
* Windows? See here: [[https://github.com/digistump/DigistumpArduino/releases/download/1.6.7/Digistump.Drivers.zip Drivers]] and [[https://github.com/digistump/DigistumpArduino/ DigistumpArduino Github Repo]] | |||
* Linux needs Micronucleus udev rules in /lib/udev/rules.d/49-micronucleus.rules | |||
SUBSYSTEMS=="usb", ATTRS{idVendor}=="16d0", ATTRS{idProduct}=="0753", MODE:="0666" | |||
KERNEL=="ttyACM*", ATTRS{idVendor}=="16d0", ATTRS{idProduct}=="0753", MODE:="0666", ENV{ID_MM_DEVICE_IGNORE}="1" | |||
if you update rules files, don't forget to | |||
sudo udevadm control --reload-rules | |||
* Example platformio.ini | |||
[env:attiny85] | |||
platform = atmelavr | |||
board = digispark-tiny | |||
framework = arduino | |||
; change microcontroller | |||
; board_build.mcu = attiny85 | |||
; change MCU frequency | |||
board_build.f_cpu = 8000000L | |||
* Example main.cpp blink sketch (different versions use pb0 or pb1 as internal onboard led) | |||
#include <Arduino.h> | |||
void setup() { | |||
pinMode(0, OUTPUT); //LED on Model B | |||
pinMode(1, OUTPUT); //LED on Model A | |||
} | |||
void loop() { | |||
digitalWrite(0, HIGH); // turn the LED on (HIGH is the voltage level) | |||
digitalWrite(1, HIGH); | |||
delay(500); // wait for half a second | |||
digitalWrite(0, LOW); // turn the LED off by making the voltage LOW | |||
digitalWrite(1, LOW); | |||
delay(500); // wait for half a second | |||
} | |||
* Flash firmware | |||
Start upload first, then plug in the device. Micronucleus finds the booting device automatically with the help of above udev rules. | |||
=== ESP8266/ESP32 === | |||
https://github.com/esp8266/Arduino | https://github.com/esp8266/Arduino | ||
many boards come with a usb to serial adapter. To give them fixed device names like /dev/tty_esp32-1, udev rules can be used: | |||
* list currently used tty USB ports | |||
ls /dev/tty[UA]* | |||
* Plug in the usb adapter or board | |||
* check name of port by listing ports again | |||
* list attributes of the adapter that can be used to uniquely identify it, e.g. for /dev/ttyUSB0 idVendor, idProduct and devpath | |||
udevadm info -a /dev/ttyUSB0 | |||
* create file like /etc/udev/rules.d/99-my-adapter.rule with this line using attributes like idProduct | |||
SUBSYSTEM=="tty", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="7523", ATTRS{devpath}=="1", MODE:="0660", GROUP:="mq135", SYMLINK+="ttyUSB_mq135" | |||
* enable the new rule and trigger it | |||
udevadm control --reload-rules | |||
udevadm trigger | |||
Now you should see /dev/ttyUSB_mq135 as link to /dev/ttyUSB0 | |||
if idProduct and idVendor is not enough, you may also use bus locations (devpath, if always plugged in the same port) or the serial (if the adapter reports a unique serial number). | |||
=== Domoticz === | |||
This is a home automation system that is natively supported by tasmota devices via mqtt | |||
==== Installation ==== | |||
===== Old Repo ===== | |||
* Add repos https://software.opensuse.org/download.html?project=home%3AGuillaume_G&package=domoticz | |||
* Install package domoticz | |||
* Create system user | |||
sudo /usr/sbin/useradd -U -g domoticz -m -r domoticz | |||
* Edit section Service in /usr/lib/systemd/system/domoticz.service (ports, logging, db) | |||
[Service] | |||
ExecStart=/opt/domoticz/domoticz -notimestamps -syslog -www 8888 -sslwww 4343 -dbase domoticz.db | |||
WorkingDirectory=/home/domoticz | |||
User=domoticz | |||
Group=domoticz | |||
Restart=always | |||
* Activate new service file, start domoticz and check status | |||
sudo systemctl daemon-reload | |||
sudo systemctl enable domoticz | |||
sudo systemctl start domoticz | |||
sudo systemctl status domoticz | |||
===== Self Compiled ===== | |||
domoticz.service | |||
<nowiki> | |||
[Unit] | |||
Description=Domoticz 4 (JoBa Edition) | |||
Wants=nss-lookup.target | |||
After=network.target | |||
[Service] | |||
PIDFile=/run/domoticz/domoticz.pid | |||
#ExecStart=/opt/domoticz/domoticz -daemon -syslog -log /var/log/domoticz.log -www 8080 -sslwww 8443 | |||
ExecStart=/opt/domoticz/domoticz -daemon -syslog -log /var/log/domoticz.log -pidfile /run/domoticz/domoticz.pid -www 8888 -sslwww 8443 | |||
ExecReload=/bin/kill -HUP $MAINPID | |||
ExecStop=/bin/kill -KILL $MAINPID | |||
User=domoticz | |||
Group=domoticz | |||
[Install] | |||
WantedBy=multi-user.target | |||
</nowiki> | |||
In domoticz.spec adapt APPVERSION, APPHASH and Version prefix | |||
<nowiki> | |||
# | |||
# spec file for package domoticz | |||
# | |||
# Copyright (c) 2014 SUSE LINUX Products GmbH, Nuernberg, Germany. | |||
# Copyright (c) 2014-2016 Guillaume GARDET <guillaume@opensuse.org> | |||
# Copyright (c) 2018 Joachim Banzhaf <joachim.banzhaf@gmail.com> | |||
# | |||
# All modifications and additions to the file contributed by third parties | |||
# remain the property of their copyright owners, unless otherwise agreed | |||
# upon. The license for this file, and modifications and additions to the | |||
# file, is the same license as for the pristine package itself (unless the | |||
# license for the pristine package is not an Open Source License, in which | |||
# case the license is the MIT License). An "Open Source License" is a | |||
# license that conforms to the Open Source Definition (Version 1.9) | |||
# published by the Open Source Initiative. | |||
# Please submit bugfixes or comments via http://bugs.opensuse.org/ | |||
# | |||
# | |||
# Hash can be found on Github, select tag, look for "Last commit xxxx" under the Clone/Download button | |||
# | |||
%define APPVERSION 9700 | |||
%define APPHASH 2772d9f | |||
Name: domoticz | |||
Summary: Domoticz is a very light weight Home Automation System | |||
Version: 4.%{APPVERSION} | |||
Release: 0 | |||
License: GPL-3.0+ | |||
Group: Productivity/Other | |||
Url: http://www.domoticz.com/ | |||
Source0: %{name}-%{version}.tar.gz | |||
Source1: domoticz.service | |||
BuildRoot: %{_tmppath}/%{name}-%{version}-build | |||
BuildRequires: cmake | |||
BuildRequires: gcc-c++ | |||
BuildRequires: pkgconfig | |||
BuildRequires: fdupes | |||
BuildRequires: openssl-devel | |||
BuildRequires: python3-devel | |||
BuildRequires: boost-devel >= 1.55 | |||
BuildRequires: curl-devel | |||
BuildRequires: libusb-devel | |||
BuildRequires: openzwave | |||
BuildRequires: libopenzwave-devel | |||
BuildRequires: libudev-devel | |||
BuildRequires: git | |||
BuildRequires: sqlite | |||
BuildRequires: sqlite-devel | |||
BuildRequires: python3-devel | |||
Requires: sqlite | |||
Requires: python3-devel | |||
BuildRequires: systemd-rpm-macros | |||
%{?systemd_requires} | |||
%description | |||
Domoticz is a very light weight Home Automation System that lets you monitor and | |||
configure various devices like: Lights, Switches, various sensors/meters like | |||
Temperature, Rain, Wind, UV, Electra, Gas, Water and much more. | |||
Notifications/Alerts can be sent to any mobile device. Supported platforms: | |||
Package for openSUSE 42.2 by Joachim.Banzhaf@gmail.com | |||
Unix/Linux, (openSUSE, Raspberry Pi/Cubieboard recommended) Windows | |||
%prep | |||
%setup -q | |||
%build | |||
cat > appversion.default << EOL | |||
#define APPVERSION %{APPVERSION} | |||
#define APPHASH "%{APPHASH}" | |||
#define APPDATE `date +%s` | |||
EOL | |||
# | |||
mkdir build/ | |||
pushd build/ | |||
cmake .. \ | |||
-DCMAKE_BUILD_TYPE=Release \ | |||
-DUSE_STATIC_BOOST=OFF \ | |||
-DUSE_STATIC_OPENZWAVE=OFF | |||
make | |||
popd | |||
%install | |||
pushd build/ | |||
%make_install | |||
popd | |||
install -m 0644 -D %{SOURCE1} %{buildroot}/%{_unitdir}/%{name}.service | |||
# | |||
# Cleanup | |||
# | |||
rm -f %{buildroot}/opt/domoticz/scripts/dzVents/runtime/tests/scandir/.f3.lua.swp | |||
# | |||
%fdupes -s %{buildroot}/opt | |||
# | |||
# Setup system | |||
# | |||
mkdir -p %{buildroot}/run/domoticz | |||
mkdir -p %{buildroot}/var/log | |||
touch %{buildroot}/var/log/domoticz.log | |||
# install /usr/lib/tmpfiles.d/domoticz.conf | |||
mkdir -p %{buildroot}%{_tmpfilesdir} | |||
cat > %{buildroot}%{_tmpfilesdir}/domoticz.conf <<EOF | |||
# domoticz needs existing /run/domoticz/ to create domoticz.pid there | |||
# See tmpfiles.d(5) for details | |||
d /run/domoticz 0755 domoticz domoticz - | |||
EOF | |||
%pre | |||
getent group domoticz >/dev/null || groupadd -r domoticz | |||
getent passwd domoticz >/dev/null || \ | |||
useradd -r -g domoticz -d %{_sharedstatedir}/domoticz -s /sbin/nologin \ | |||
-c "domoticz daemon account" domoticz | |||
%if 0%{?_unitdir:1} | |||
%service_add_pre domoticz.service | |||
%endif | |||
%post | |||
%if 0%{?_unitdir:1} | |||
%service_add_post domoticz.service | |||
%endif | |||
%preun | |||
%if 0%{?_unitdir:1} | |||
%service_del_preun domoticz.service | |||
%endif | |||
%postun | |||
%if 0%{?_unitdir:1} | |||
%service_del_postun domoticz.service | |||
%endif | |||
%files | |||
%defattr(-,root,root) | |||
%dir %attr(0755,domoticz,domoticz) /opt/domoticz/ | |||
%dir %attr(0755,domoticz,domoticz) /run/domoticz/ | |||
%attr(-,domoticz,domoticz) /opt/domoticz/* | |||
%{_tmpfilesdir}/domoticz.conf | |||
%{_unitdir}/%{name}.service | |||
%attr(0644,domoticz,domoticz) /var/log/domoticz.log | |||
%changelog | |||
</nowiki> | |||
Add to /usr/share/cmake/Modules/FindOpenSSL.cmake after failing find_library() calls | |||
set(OPENSSL_SSL_LIBRARY "/usr/lib64/libssl.so") | |||
set(OPENSSL_CRYPTO_LIBRARY "/usr/lib64/libcrypto.so") | |||
Commands to download, build, update and install | |||
v=4.9700 | |||
zypper in libopenzwave-devel libopenssl-devel libcrypto41 | |||
mkdir -p /home/joachim/rpmbuild/SPECS /home/joachim/rpmbuild/SOURCES | |||
wget -O domoticz.zip https://github.com/domoticz/domoticz/archive/${v}.zip | |||
unzip domoticz.zip | |||
tar czf /home/joachim/rpmbuild/SOURCES/domoticz-$v.tar.gz domoticz-${v}/ | |||
rpmbuild -ba /home/joachim/rpmbuild/SPECS/domoticz.spec | |||
sudo rpm -Uhv /home/joachim/rpmbuild/RPMS/x86_64/domoticz-${v}-0.x86_64.rpm | |||
sudo systemctl start domoticz.service | |||
Commands for git version (modify spec as above, and I used git clone --recursive, not sure it is needed...) | |||
v=5.0000 | |||
git clone https://github.com/domoticz/domoticz.git domoticz-$v | |||
tar czf /home/joachim/rpmbuild/SOURCES/domoticz-$v.tar.gz domoticz-${v}/ | |||
rpmbuild -ba /home/joachim/rpmbuild/SPECS/domoticz.spec | |||
sudo rpm -Uhv /home/joachim/rpmbuild/RPMS/x86_64/domoticz-${v}-0.x86_64.rpm | |||
sudo systemctl start domoticz.service | |||
===== Update to git release ===== | |||
Optional: download compile and install latest (or specific) python version, move to domoticz and install modules. | |||
If you do that, the python environment during build and run must be the same version! | |||
sudo su - domoticz | |||
getpy.sh 3.12.1 | |||
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:~/python-3.12.1/lib | |||
. ~/python-3.12.1/venv/base/bin/activate | |||
Modify line in domoticz.service file, so modules installed for a venv are found | |||
Environment="LD_LIBRARY_PATH=/home/domoticz/python-3.12.1/lib:$LD_LIBRARY_PATH" "PATH=/home/domoticz/python-3.12.1/bin:/home/domoticz/bin:/usr/local/bin:/usr/bin:/bin" "PYTHONHOME=/home/domoticz/python-3.12.1" "PYTHONPATH=/home/domoticz/python-3.12.1/lib/python3.12:/home/domoticz/python-3.12.1/venv/base/lib:/home/domoticz/python-3.12.1/venv/base/lib64/python3.12/site-packages:home/domoticz/python-3.12.1/lib/python3.12/lib-dynload:/home/domoticz/python-3.12.1/venv/base/lib/python3.12/lib-dynload" | |||
Install required modules | |||
pip install sseclient requests bluepy | |||
Update git repo to desired release (yyyy.n or main or...) | |||
cd ~/git/domoticz | |||
git fetch | |||
git checkout 2023.2 | |||
git submodule update --recursive --remote | |||
Create buildfiles, check for missing prerequisites, install them, then repeat | |||
rmdir -rf cbuild && mkdir cbuild && cd cbuild | |||
cmake -DCMAKE_BUILD_TYPE=Release -DPython3_ROOT_DIR=~/python-3.12.1 -DCMAKE_INSTALL_PREFIX=/opt/domoticz -DUSE_STATIC_BOOST=OFF .. | |||
Build | |||
make -j3 | |||
make install | |||
# testrun | |||
/opt/domoticz/domoticz -www 8888 -sslwww 8443 | |||
# update python version in service file if needed | |||
sudo vi /etc/systemd/system/domoticz.service | |||
sudo systemctl restart domoticz.service | |||
==== Backup ==== | |||
Backups of domoticz database in /opt/domoticz/backups, or copy /opt/domoticz/domoticz.db yourself. | |||
==== Configuration ==== | |||
https://github.com/arendst/Sonoff-Tasmota/wiki/Domoticz | |||
* On setup/hardware page create mqtt connection (host job4, port 1883, option flat/out) and one Dummy device for virtual switches | |||
* For each tasmota device function (switch, temp/hum, ...) click on "virtual sensor" (on hardware page at dummy device entry) | |||
* On setup/devices page look at idx values for the virtual sensor devices and configure tasmota device with them. | |||
=== Cura Build === | |||
==== Prerequisites ==== | |||
git clone https://github.com/Ultimaker/Cura.git | |||
git clone https://github.com/Ultimaker/cura-build | |||
Follow instructions for CentOS in cura-build/README.md and try to adapt for opensuse 42.2 | |||
sudo zypper in gcc-fortran python3 python3-pyserial python3-numpy python3-opengl python3-setuptools libstdc++-devel openssl openblas-devel gtk3-devel webkit2gtk3-devel gstreamer-devel python-wxWidgets-3_0 python-wxWidgets-3_0-devel | |||
# pip3 install F2PY | |||
F2PY not found -> build may fail | |||
==== Installation ==== | |||
cmake fails because it needs python 3.5 while opensuse 42.2 only has 3.4 - end of story for now :( | |||
Use app container for now (but how to use core functions directly?) | |||
=== Feinstaubsensor === | |||
https://luftdaten.info/feinstaubsensor-bauen/ | |||
* NodeMCU | |||
* SDS011 | |||
* optional: BME280 (probably needs code change since they use DHT22) | |||
* USB powersupply | |||
* USB cable | |||
* 2 x Marley HT DN75, 87° | |||
* Gaze als Insektenschutz | |||
* 3 x Kabelbinder lang (für Gaze an Marley, Fixierung an Pfosten o.ä.) und kurz (Kabel/NodeMCU/SDS011/BME280) fixieren | |||
* ~20cm Plastikröhrchen Innendurchmesser 6mm (dunkel) | |||
Cost ~25€ | |||
=== RFID Demo === | |||
https://github.com/miguelbalboa/rfid/blob/master/examples/AccessControl/AccessControl.ino | |||
What is needed for an access control demo (might send mqtt status): | |||
* ESP8266 as central unit | |||
* RFID reader/writer | |||
* 1 RFID Card (Master) | |||
* n RFID Tags (ID "Cards") | |||
* USB Cable MicroUSB | |||
* LED for access granted or added: green | |||
* LED for access denied or removed or error: red (red+green: master mode) | |||
* Dupont cabling for reader (~10 f-f) | |||
* Breadboard | |||
Cost ~5€ | |||
=== RF-Link === | |||
RF-Link is a gateway transceiver for many 433MHz (and other frequencies) controlled devices, like weather stations and remote controlled plugs. | |||
You need an Atmega 2560, an RF receiver and sender of the desired frequency (e.g. an RXB6 and an FS-1000a) and wire it as described here: http://www.rflink.nl/blog2/wiring (should be below 15€). | |||
* Download RF-Link Firmware from here: http://www.rflink.nl/blog2/download | |||
* Unzip it to an empty folder and cd to the directory containing RFLink.cpp.hex | |||
* Upload with Arduino IDE supplied avrdude (or find it elsewhere...). Adjust serial port as needed | |||
~/.arduino15/packages/arduino/tools/avrdude/6.3.0-arduino9/bin/avrdude -C~/.arduino15/packages/arduino/tools/avrdude/6.3.0-arduino9/etc/avrdude.conf -patmega2560 -cstk500v2 -P/dev/ttyUSB1 -b115200 -D -Uflash:w:RFLink.cpp.hex:i | |||
Now connect the Atmega usb serial with a pc, start a terminal program with that port at 57600 baud and read what is in the air. | |||
Some commands to try are here: http://www.rflink.nl/blog2/protref | |||
Domoticz home automation can integrate an RF-Link via serial and via ethernet (not tested, sernet? ehternet shield?). It autodetects available devices (enable for 5min in settings) and can control switches after "learning" them. Basically all devices I already owned did work, good coverage. Currently I have one issue with this: domoticz can only use the device if I open it before with a terminal program - no idea why... | |||
Antennas for 433MHz can be thick single wire of 16.8cm length. It should point in a direction 90 degrees from the direction to the device most problematic to communicate with. I could communicate with devices outside the house, ~5m away and also inside but one floor down or up, ~12m away. | |||
=== Mosquitto MQTT Broker === | |||
Basic setup is easy, getting secure TLS to work not quite so. | |||
==== Preparation ==== | |||
With leap 15 mosquitto is provided with the standard repositories. | |||
Older suse versions need to add a repo (e.g. http://download.opensuse.org/repositories/network:/messaging:/mqtt/openSUSE_Leap_42.2/) | |||
==== Installation ==== | |||
sudo zypper in mosquitto mosquitto-clients | |||
systemctl enable mosquitto | |||
==== Configuration ==== | |||
Provide a file /etc/mosquitto/conf.d/tls.conf | |||
# for my local unencrypted clients anonymous is ok | |||
allow_anonymous true | |||
# This would require the cert cn or username in the passwd file | |||
# allow_anonymous false | |||
# password_file /etc/mosquitto/passwd | |||
port 1883 | |||
# additional listener for TLS | |||
listener 8883 | |||
# my own ca so the broker can trust my clients | |||
cafile /etc/mosquitto/ca_certificates/ca.crt | |||
# my official lets encrypt cert so clients can trust the broker | |||
certfile /etc/letsencrypt/live/banzhaf.chickenkiller.com/fullchain.pem | |||
keyfile /etc/letsencrypt/live/banzhaf.chickenkiller.com/privkey.pem | |||
# TLS needs client certificate (of my ca) to allow access | |||
require_certificate true | |||
use_identity_as_username true | |||
use_username_as_clientid true | |||
# additional listener. Some clients only talk websockets | |||
listener 9001 | |||
protocol websockets | |||
==== Start Mosquitto Service ==== | |||
systemctl start mosquitto | |||
==== Example Usage ==== | |||
* Subscribe to all topics of local mosquitto broker | |||
mosquitto_sub -v -t \# | |||
* Publish message "hello" to topic "world" on local mosquitto broker | |||
mosquitto_pub -m hello -t world | |||
* Publish securely via TLS | |||
mosquitto_pub -h banzhaf.chickenkiller.com -p 8883 -m hello -t safeworld \\ | |||
--cafile /etc/ssl/certs/DST_Root_CA_X3.pem \\ | |||
--cert mqtt1@banzhaf.chickenkiller.com.crt \\ | |||
--key mqtt1@banzhaf.chickenkiller.com.key | |||
** banzhaf.chickenkiller.com is the broker server with a valid Lets Encrypt server certificate | |||
** 8883 is the TLS listening port of the broker | |||
** hello is the published message | |||
** safeworld is the topic (category) where the message is published | |||
** /etc/ssl/certs/DST_Root_CA_X3.pem is the CA certificate of Lets Encrypt | |||
** mqtt1@banzhaf.chickenkiller.com.crt is a client certificate issued by my own CA | |||
** mqtt1@banzhaf.chickenkiller.com.key is the encryption key of the client certificate | |||
==== Common Errors ==== | |||
* Every TLS client needs its own certificate, because else they disconnect eachother | |||
* Don't forget to restart the broker if there is a new server certificate (every 90 days) | |||
* On errors with the server certificate, you loose connection with this message (server log says: GET_CLIENT_HELLO:unknown protocol) | |||
Error: The connection was lost. | |||
* On errors with the client certificate, you loose connection with this message (server log says: peer did not return a certificate) | |||
Error: A TLS error occurred. | |||
== Sonoff Basic Tasmota Config for I2C == | |||
just noticed I did not note that anywhere else: my Sonoff basic is configured like this: | |||
* serial log off | |||
* serial out GPIO 1 -> SDA | |||
* serial in GPIO 3 -> SCL | |||
== Tasmota Build == | |||
First fork github tasmota repo or merge a pull request to an existing fork, then replace MyPw below and add other -e options if needed | |||
WLAN_PW="MyPw" | |||
git clone git@github.com:joba-1/Tasmota.git | |||
cd Tasmota/ | |||
cp tasmota/user_config_override_sample.h tasmota/user_config_override.h | |||
sed -i "s/YourWifiPassword/$WLAN_PW/" tasmota/user_config_override.h | |||
sed -i -e's/YourSSID/job.fritz.ssid/' -e 's/your-mqtt-server.com/192.168.1.4/' -e 's/MY_IP/0.0.0.0/' tasmota/user_config_override.h | |||
PLATFORMIO_BUILD_FLAGS=-DUSE_CONFIG_OVERRIDE pio run -e tasmota-sensors -e tasmota-minimal | |||
for f in .pioenvs/*/firmware.bin; do g="${f/\/firmware}"; gzip <"$f" >"/srv/www/htdocs/${g/.pioenvs\/}.gz"; done | |||
for f in .pio/build/*/firmware.bin; do g="${f/\/firmware}"; gzip <"$f" >"/srv/www/htdocs/${g/.pio\/build\/}.gz"; done | |||
Now compiled variants are accessible with the local webserver. | |||
If you don't have a webserver running, just do "cd /srv/www/htdocs/ && python3 -m http.server 8000" and you have one. | |||
== Longan Nano Bits of Wisdom == | |||
use PlatformIO :) | |||
* https://github.com/joba-1/Longan-Nano-Bme280-Spi | |||
* https://github.com/MuellerA/LonganNanoTest/tree/master/SpiDma/src | |||
* https://www.susa.net/wordpress/2019/10/longan-nano-gd32vf103/ | |||
* https://github.com/linusreM/Longan-RISC-V-examples | |||
* https://github.com/riscv/riscv-asm-manual/blob/master/riscv-asm.md | |||
* https://github.com/sipeed/platform-gd32v | |||
=== OpenOcd === | |||
==== Discover board correctly ==== | |||
You see this during upload or debug with sipeed jtag : | |||
Info : JTAG tap: riscv.cpu tap/device found: 0x1000563d (mfg: 0x31e (Andes Technology Corporation), part: 0x0005, ver: 0x1) | |||
Warn : JTAG tap: riscv.cpu UNEXPECTED: 0x1000563d (mfg: 0x31e (Andes Technology Corporation), part: 0x0005, ver: 0x1) | |||
Error: JTAG tap: riscv.cpu expected 1 of 1: 0x1e200a6d (mfg: 0x536 (Nuclei System Technology Co.,Ltd.), part: 0xe200, ver: 0x1) | |||
Info : JTAG tap: auto0.tap tap/device found: 0x790007a3 (mfg: 0x3d1 (GigaDevice Semiconductor (Beijing)), part: 0x9000, ver: 0x7) | |||
Error: Trying to use configured scan chain anyway... | |||
* vi ~/.platformio/packages/tool-openocd-gd32v/share/openocd/scripts/target/gd32vf103.cfg | |||
* Change expexted id at the end of line "jtag newtap $_CHIPNAME cpu -irlen 5 -expected-id 0x1e200a6d" to "0x1000563d" | |||
Errormessage should be gone. No idea if it actually changes any behaviour... | |||
==== Enable Longan-Nano/GD32VF103 reset via jtag adapter ==== | |||
as far as I understand it, the gd32vf103 has no normal way to be reset via jtag. | |||
If you upload and debug: all fine. But if you upload and want to run the target without debug: nothing happens. Reset button is not functional. | |||
This can be remedied with a manual power cycle, but that is not convenient... | |||
This is a gist provides a solution: https://gist.github.com/elfmimi/1deb9c94b0f0900ae8a9df740b62bcd6 | |||
* Replace file ~/.platformio/packages/tool-openocd-gd32v/share/openocd/scripts/target/gd32vf103.cfg with the gist version | |||
* Modify ~/.platformio/platforms/gd32v/builder/main.py: change the whole line containig 'program {$SOURCE}' with ' "-c", "program {$SOURCE} verify reset exit"' | |||
This is the openocd command to flash the Longan Nano, firmware path relative to the project directory: | |||
FW=.pio/build/sipeed-longan-nano/firmware.elf | |||
OCD=~/.platformio/packages/tool-openocd-gd32v | |||
$OCD/bin/openocd -s $OCD/share/openocd/scripts -f interface/ftdi/sipeed-rv-debugger.cfg -f target/gd32vf103.cfg -c "init; halt;" -c "program $FW verify reset exit" | |||
Latest revision as of 20:31, 8 December 2023
IoT - Internet of Things
some project ideas and notes regarding Arduino, ESP8266, ESP32 and other micro controllers
- Arduino Nano with 433 MHz data transfer
- ESP-01 for shutter control
- ESP-12 for LED switch
- ESP-12 for laundry room air control
- SonOff with own firmware and tasmota devices
https://github.com/arendst/Sonoff-Tasmota/wiki
Arduino IDE Inofficial Boards
look here for an overview:
ATTiny
Most ATTinys: https://github.com/SpenceKonde/ATTinyCore
- Datasheet 2313: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-2543-AVR-ATtiny2313_Datasheet.pdf
- Datasheet 2313 Summary: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-2543-AVR-ATtiny2313_Summary.pdf
- Pinout 2313: https://github.com/SpenceKonde/ATTinyCore/blob/master/avr/extras/Pinout_x313.jpg
{kind=link}
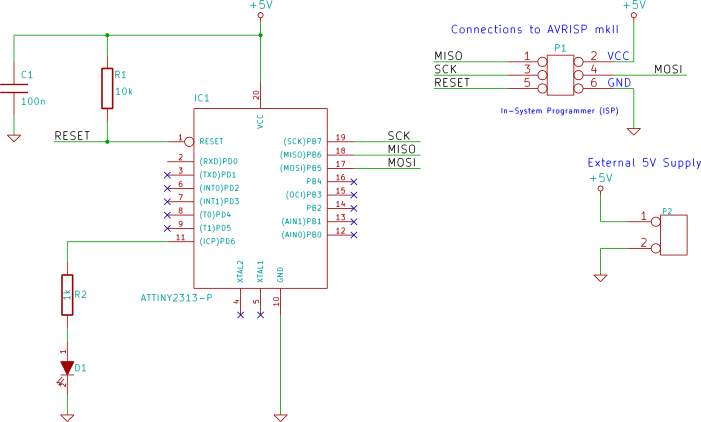
Wiring
{kind=link}
- Vcc can also be 3.3V
- C1 can have bigger capacity for unstable voltage
- R1 can be higher values
Programmer
I have an USBasp. Program with avrdude. Works integrated in Arduino IDE. Ignore warning "avrdude: warning: cannot set sck period. please check for usbasp firmware update.".
Numbering of Connector is
1 3 5 7 9 2 4 6 8 10
Need to connect Vcc, Gnd, Miso(1), Mosi, Reset and Sck
New chip needed 0.5MHz for correct timing with delay()
Needed to add this udev rule
echo 'SUBSYSTEMS=="usb", ATTRS{idVendor}=="16c0", ATTRS{idProduct}=="05dc", GROUP="dialout", MODE="0660"' | sudo sh -c 'cat >/etc/udev/rules.d/50-USBasp.rules'
Digistump
or compatible board with ATTiny85 and USB (P0-P5 and 5V/Gnd/Vin broken out)
- Windows? See here: [Drivers] and [DigistumpArduino Github Repo]
- Linux needs Micronucleus udev rules in /lib/udev/rules.d/49-micronucleus.rules
SUBSYSTEMS=="usb", ATTRS{idVendor}=="16d0", ATTRS{idProduct}=="0753", MODE:="0666"
KERNEL=="ttyACM*", ATTRS{idVendor}=="16d0", ATTRS{idProduct}=="0753", MODE:="0666", ENV{ID_MM_DEVICE_IGNORE}="1"
if you update rules files, don't forget to
sudo udevadm control --reload-rules
- Example platformio.ini
[env:attiny85] platform = atmelavr board = digispark-tiny framework = arduino ; change microcontroller ; board_build.mcu = attiny85 ; change MCU frequency board_build.f_cpu = 8000000L
- Example main.cpp blink sketch (different versions use pb0 or pb1 as internal onboard led)
#include <Arduino.h>
void setup() {
pinMode(0, OUTPUT); //LED on Model B
pinMode(1, OUTPUT); //LED on Model A
}
void loop() {
digitalWrite(0, HIGH); // turn the LED on (HIGH is the voltage level)
digitalWrite(1, HIGH);
delay(500); // wait for half a second
digitalWrite(0, LOW); // turn the LED off by making the voltage LOW
digitalWrite(1, LOW);
delay(500); // wait for half a second
}
- Flash firmware
Start upload first, then plug in the device. Micronucleus finds the booting device automatically with the help of above udev rules.
ESP8266/ESP32
https://github.com/esp8266/Arduino
many boards come with a usb to serial adapter. To give them fixed device names like /dev/tty_esp32-1, udev rules can be used:
- list currently used tty USB ports
ls /dev/tty[UA]*
- Plug in the usb adapter or board
- check name of port by listing ports again
- list attributes of the adapter that can be used to uniquely identify it, e.g. for /dev/ttyUSB0 idVendor, idProduct and devpath
udevadm info -a /dev/ttyUSB0
- create file like /etc/udev/rules.d/99-my-adapter.rule with this line using attributes like idProduct
SUBSYSTEM=="tty", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="7523", ATTRS{devpath}=="1", MODE:="0660", GROUP:="mq135", SYMLINK+="ttyUSB_mq135"
- enable the new rule and trigger it
udevadm control --reload-rules udevadm trigger
Now you should see /dev/ttyUSB_mq135 as link to /dev/ttyUSB0
if idProduct and idVendor is not enough, you may also use bus locations (devpath, if always plugged in the same port) or the serial (if the adapter reports a unique serial number).
Domoticz
This is a home automation system that is natively supported by tasmota devices via mqtt
Installation
Old Repo
- Add repos https://software.opensuse.org/download.html?project=home%3AGuillaume_G&package=domoticz
- Install package domoticz
- Create system user
sudo /usr/sbin/useradd -U -g domoticz -m -r domoticz
- Edit section Service in /usr/lib/systemd/system/domoticz.service (ports, logging, db)
[Service] ExecStart=/opt/domoticz/domoticz -notimestamps -syslog -www 8888 -sslwww 4343 -dbase domoticz.db WorkingDirectory=/home/domoticz User=domoticz Group=domoticz Restart=always
- Activate new service file, start domoticz and check status
sudo systemctl daemon-reload sudo systemctl enable domoticz sudo systemctl start domoticz sudo systemctl status domoticz
Self Compiled
domoticz.service
[Unit] Description=Domoticz 4 (JoBa Edition) Wants=nss-lookup.target After=network.target [Service] PIDFile=/run/domoticz/domoticz.pid #ExecStart=/opt/domoticz/domoticz -daemon -syslog -log /var/log/domoticz.log -www 8080 -sslwww 8443 ExecStart=/opt/domoticz/domoticz -daemon -syslog -log /var/log/domoticz.log -pidfile /run/domoticz/domoticz.pid -www 8888 -sslwww 8443 ExecReload=/bin/kill -HUP $MAINPID ExecStop=/bin/kill -KILL $MAINPID User=domoticz Group=domoticz [Install] WantedBy=multi-user.target
In domoticz.spec adapt APPVERSION, APPHASH and Version prefix
#
# spec file for package domoticz
#
# Copyright (c) 2014 SUSE LINUX Products GmbH, Nuernberg, Germany.
# Copyright (c) 2014-2016 Guillaume GARDET <guillaume@opensuse.org>
# Copyright (c) 2018 Joachim Banzhaf <joachim.banzhaf@gmail.com>
#
# All modifications and additions to the file contributed by third parties
# remain the property of their copyright owners, unless otherwise agreed
# upon. The license for this file, and modifications and additions to the
# file, is the same license as for the pristine package itself (unless the
# license for the pristine package is not an Open Source License, in which
# case the license is the MIT License). An "Open Source License" is a
# license that conforms to the Open Source Definition (Version 1.9)
# published by the Open Source Initiative.
# Please submit bugfixes or comments via http://bugs.opensuse.org/
#
#
# Hash can be found on Github, select tag, look for "Last commit xxxx" under the Clone/Download button
#
%define APPVERSION 9700
%define APPHASH 2772d9f
Name: domoticz
Summary: Domoticz is a very light weight Home Automation System
Version: 4.%{APPVERSION}
Release: 0
License: GPL-3.0+
Group: Productivity/Other
Url: http://www.domoticz.com/
Source0: %{name}-%{version}.tar.gz
Source1: domoticz.service
BuildRoot: %{_tmppath}/%{name}-%{version}-build
BuildRequires: cmake
BuildRequires: gcc-c++
BuildRequires: pkgconfig
BuildRequires: fdupes
BuildRequires: openssl-devel
BuildRequires: python3-devel
BuildRequires: boost-devel >= 1.55
BuildRequires: curl-devel
BuildRequires: libusb-devel
BuildRequires: openzwave
BuildRequires: libopenzwave-devel
BuildRequires: libudev-devel
BuildRequires: git
BuildRequires: sqlite
BuildRequires: sqlite-devel
BuildRequires: python3-devel
Requires: sqlite
Requires: python3-devel
BuildRequires: systemd-rpm-macros
%{?systemd_requires}
%description
Domoticz is a very light weight Home Automation System that lets you monitor and
configure various devices like: Lights, Switches, various sensors/meters like
Temperature, Rain, Wind, UV, Electra, Gas, Water and much more.
Notifications/Alerts can be sent to any mobile device. Supported platforms:
Package for openSUSE 42.2 by Joachim.Banzhaf@gmail.com
Unix/Linux, (openSUSE, Raspberry Pi/Cubieboard recommended) Windows
%prep
%setup -q
%build
cat > appversion.default << EOL
#define APPVERSION %{APPVERSION}
#define APPHASH "%{APPHASH}"
#define APPDATE `date +%s`
EOL
#
mkdir build/
pushd build/
cmake .. \
-DCMAKE_BUILD_TYPE=Release \
-DUSE_STATIC_BOOST=OFF \
-DUSE_STATIC_OPENZWAVE=OFF
make
popd
%install
pushd build/
%make_install
popd
install -m 0644 -D %{SOURCE1} %{buildroot}/%{_unitdir}/%{name}.service
#
# Cleanup
#
rm -f %{buildroot}/opt/domoticz/scripts/dzVents/runtime/tests/scandir/.f3.lua.swp
#
%fdupes -s %{buildroot}/opt
#
# Setup system
#
mkdir -p %{buildroot}/run/domoticz
mkdir -p %{buildroot}/var/log
touch %{buildroot}/var/log/domoticz.log
# install /usr/lib/tmpfiles.d/domoticz.conf
mkdir -p %{buildroot}%{_tmpfilesdir}
cat > %{buildroot}%{_tmpfilesdir}/domoticz.conf <<EOF
# domoticz needs existing /run/domoticz/ to create domoticz.pid there
# See tmpfiles.d(5) for details
d /run/domoticz 0755 domoticz domoticz -
EOF
%pre
getent group domoticz >/dev/null || groupadd -r domoticz
getent passwd domoticz >/dev/null || \
useradd -r -g domoticz -d %{_sharedstatedir}/domoticz -s /sbin/nologin \
-c "domoticz daemon account" domoticz
%if 0%{?_unitdir:1}
%service_add_pre domoticz.service
%endif
%post
%if 0%{?_unitdir:1}
%service_add_post domoticz.service
%endif
%preun
%if 0%{?_unitdir:1}
%service_del_preun domoticz.service
%endif
%postun
%if 0%{?_unitdir:1}
%service_del_postun domoticz.service
%endif
%files
%defattr(-,root,root)
%dir %attr(0755,domoticz,domoticz) /opt/domoticz/
%dir %attr(0755,domoticz,domoticz) /run/domoticz/
%attr(-,domoticz,domoticz) /opt/domoticz/*
%{_tmpfilesdir}/domoticz.conf
%{_unitdir}/%{name}.service
%attr(0644,domoticz,domoticz) /var/log/domoticz.log
%changelog
Add to /usr/share/cmake/Modules/FindOpenSSL.cmake after failing find_library() calls
set(OPENSSL_SSL_LIBRARY "/usr/lib64/libssl.so") set(OPENSSL_CRYPTO_LIBRARY "/usr/lib64/libcrypto.so")
Commands to download, build, update and install
v=4.9700 zypper in libopenzwave-devel libopenssl-devel libcrypto41 mkdir -p /home/joachim/rpmbuild/SPECS /home/joachim/rpmbuild/SOURCES wget -O domoticz.zip https://github.com/domoticz/domoticz/archive/${v}.zip unzip domoticz.zip tar czf /home/joachim/rpmbuild/SOURCES/domoticz-$v.tar.gz domoticz-${v}/ rpmbuild -ba /home/joachim/rpmbuild/SPECS/domoticz.spec sudo rpm -Uhv /home/joachim/rpmbuild/RPMS/x86_64/domoticz-${v}-0.x86_64.rpm sudo systemctl start domoticz.service
Commands for git version (modify spec as above, and I used git clone --recursive, not sure it is needed...)
v=5.0000 git clone https://github.com/domoticz/domoticz.git domoticz-$v tar czf /home/joachim/rpmbuild/SOURCES/domoticz-$v.tar.gz domoticz-${v}/ rpmbuild -ba /home/joachim/rpmbuild/SPECS/domoticz.spec sudo rpm -Uhv /home/joachim/rpmbuild/RPMS/x86_64/domoticz-${v}-0.x86_64.rpm sudo systemctl start domoticz.service
Update to git release
Optional: download compile and install latest (or specific) python version, move to domoticz and install modules. If you do that, the python environment during build and run must be the same version!
sudo su - domoticz getpy.sh 3.12.1 export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:~/python-3.12.1/lib . ~/python-3.12.1/venv/base/bin/activate
Modify line in domoticz.service file, so modules installed for a venv are found
Environment="LD_LIBRARY_PATH=/home/domoticz/python-3.12.1/lib:$LD_LIBRARY_PATH" "PATH=/home/domoticz/python-3.12.1/bin:/home/domoticz/bin:/usr/local/bin:/usr/bin:/bin" "PYTHONHOME=/home/domoticz/python-3.12.1" "PYTHONPATH=/home/domoticz/python-3.12.1/lib/python3.12:/home/domoticz/python-3.12.1/venv/base/lib:/home/domoticz/python-3.12.1/venv/base/lib64/python3.12/site-packages:home/domoticz/python-3.12.1/lib/python3.12/lib-dynload:/home/domoticz/python-3.12.1/venv/base/lib/python3.12/lib-dynload"
Install required modules
pip install sseclient requests bluepy
Update git repo to desired release (yyyy.n or main or...)
cd ~/git/domoticz git fetch git checkout 2023.2 git submodule update --recursive --remote
Create buildfiles, check for missing prerequisites, install them, then repeat
rmdir -rf cbuild && mkdir cbuild && cd cbuild cmake -DCMAKE_BUILD_TYPE=Release -DPython3_ROOT_DIR=~/python-3.12.1 -DCMAKE_INSTALL_PREFIX=/opt/domoticz -DUSE_STATIC_BOOST=OFF ..
Build
make -j3 make install # testrun /opt/domoticz/domoticz -www 8888 -sslwww 8443 # update python version in service file if needed sudo vi /etc/systemd/system/domoticz.service sudo systemctl restart domoticz.service
Backup
Backups of domoticz database in /opt/domoticz/backups, or copy /opt/domoticz/domoticz.db yourself.
Configuration
https://github.com/arendst/Sonoff-Tasmota/wiki/Domoticz
- On setup/hardware page create mqtt connection (host job4, port 1883, option flat/out) and one Dummy device for virtual switches
- For each tasmota device function (switch, temp/hum, ...) click on "virtual sensor" (on hardware page at dummy device entry)
- On setup/devices page look at idx values for the virtual sensor devices and configure tasmota device with them.
Cura Build
Prerequisites
git clone https://github.com/Ultimaker/Cura.git git clone https://github.com/Ultimaker/cura-build
Follow instructions for CentOS in cura-build/README.md and try to adapt for opensuse 42.2
sudo zypper in gcc-fortran python3 python3-pyserial python3-numpy python3-opengl python3-setuptools libstdc++-devel openssl openblas-devel gtk3-devel webkit2gtk3-devel gstreamer-devel python-wxWidgets-3_0 python-wxWidgets-3_0-devel # pip3 install F2PY
F2PY not found -> build may fail
Installation
cmake fails because it needs python 3.5 while opensuse 42.2 only has 3.4 - end of story for now :(
Use app container for now (but how to use core functions directly?)
Feinstaubsensor
https://luftdaten.info/feinstaubsensor-bauen/
- NodeMCU
- SDS011
- optional: BME280 (probably needs code change since they use DHT22)
- USB powersupply
- USB cable
- 2 x Marley HT DN75, 87°
- Gaze als Insektenschutz
- 3 x Kabelbinder lang (für Gaze an Marley, Fixierung an Pfosten o.ä.) und kurz (Kabel/NodeMCU/SDS011/BME280) fixieren
- ~20cm Plastikröhrchen Innendurchmesser 6mm (dunkel)
Cost ~25€
RFID Demo
https://github.com/miguelbalboa/rfid/blob/master/examples/AccessControl/AccessControl.ino
What is needed for an access control demo (might send mqtt status):
- ESP8266 as central unit
- RFID reader/writer
- 1 RFID Card (Master)
- n RFID Tags (ID "Cards")
- USB Cable MicroUSB
- LED for access granted or added: green
- LED for access denied or removed or error: red (red+green: master mode)
- Dupont cabling for reader (~10 f-f)
- Breadboard
Cost ~5€
RF-Link
RF-Link is a gateway transceiver for many 433MHz (and other frequencies) controlled devices, like weather stations and remote controlled plugs.
You need an Atmega 2560, an RF receiver and sender of the desired frequency (e.g. an RXB6 and an FS-1000a) and wire it as described here: http://www.rflink.nl/blog2/wiring (should be below 15€).
- Download RF-Link Firmware from here: http://www.rflink.nl/blog2/download
- Unzip it to an empty folder and cd to the directory containing RFLink.cpp.hex
- Upload with Arduino IDE supplied avrdude (or find it elsewhere...). Adjust serial port as needed
~/.arduino15/packages/arduino/tools/avrdude/6.3.0-arduino9/bin/avrdude -C~/.arduino15/packages/arduino/tools/avrdude/6.3.0-arduino9/etc/avrdude.conf -patmega2560 -cstk500v2 -P/dev/ttyUSB1 -b115200 -D -Uflash:w:RFLink.cpp.hex:i
Now connect the Atmega usb serial with a pc, start a terminal program with that port at 57600 baud and read what is in the air. Some commands to try are here: http://www.rflink.nl/blog2/protref
Domoticz home automation can integrate an RF-Link via serial and via ethernet (not tested, sernet? ehternet shield?). It autodetects available devices (enable for 5min in settings) and can control switches after "learning" them. Basically all devices I already owned did work, good coverage. Currently I have one issue with this: domoticz can only use the device if I open it before with a terminal program - no idea why...
Antennas for 433MHz can be thick single wire of 16.8cm length. It should point in a direction 90 degrees from the direction to the device most problematic to communicate with. I could communicate with devices outside the house, ~5m away and also inside but one floor down or up, ~12m away.
Mosquitto MQTT Broker
Basic setup is easy, getting secure TLS to work not quite so.
Preparation
With leap 15 mosquitto is provided with the standard repositories. Older suse versions need to add a repo (e.g. http://download.opensuse.org/repositories/network:/messaging:/mqtt/openSUSE_Leap_42.2/)
Installation
sudo zypper in mosquitto mosquitto-clients systemctl enable mosquitto
Configuration
Provide a file /etc/mosquitto/conf.d/tls.conf
# for my local unencrypted clients anonymous is ok allow_anonymous true # This would require the cert cn or username in the passwd file # allow_anonymous false # password_file /etc/mosquitto/passwd port 1883 # additional listener for TLS listener 8883 # my own ca so the broker can trust my clients cafile /etc/mosquitto/ca_certificates/ca.crt # my official lets encrypt cert so clients can trust the broker certfile /etc/letsencrypt/live/banzhaf.chickenkiller.com/fullchain.pem keyfile /etc/letsencrypt/live/banzhaf.chickenkiller.com/privkey.pem # TLS needs client certificate (of my ca) to allow access require_certificate true use_identity_as_username true use_username_as_clientid true # additional listener. Some clients only talk websockets listener 9001 protocol websockets
Start Mosquitto Service
systemctl start mosquitto
Example Usage
- Subscribe to all topics of local mosquitto broker
mosquitto_sub -v -t \#
- Publish message "hello" to topic "world" on local mosquitto broker
mosquitto_pub -m hello -t world
- Publish securely via TLS
mosquitto_pub -h banzhaf.chickenkiller.com -p 8883 -m hello -t safeworld \\ --cafile /etc/ssl/certs/DST_Root_CA_X3.pem \\ --cert mqtt1@banzhaf.chickenkiller.com.crt \\ --key mqtt1@banzhaf.chickenkiller.com.key
- banzhaf.chickenkiller.com is the broker server with a valid Lets Encrypt server certificate
- 8883 is the TLS listening port of the broker
- hello is the published message
- safeworld is the topic (category) where the message is published
- /etc/ssl/certs/DST_Root_CA_X3.pem is the CA certificate of Lets Encrypt
- mqtt1@banzhaf.chickenkiller.com.crt is a client certificate issued by my own CA
- mqtt1@banzhaf.chickenkiller.com.key is the encryption key of the client certificate
Common Errors
- Every TLS client needs its own certificate, because else they disconnect eachother
- Don't forget to restart the broker if there is a new server certificate (every 90 days)
- On errors with the server certificate, you loose connection with this message (server log says: GET_CLIENT_HELLO:unknown protocol)
Error: The connection was lost.
- On errors with the client certificate, you loose connection with this message (server log says: peer did not return a certificate)
Error: A TLS error occurred.
Sonoff Basic Tasmota Config for I2C
just noticed I did not note that anywhere else: my Sonoff basic is configured like this:
- serial log off
- serial out GPIO 1 -> SDA
- serial in GPIO 3 -> SCL
Tasmota Build
First fork github tasmota repo or merge a pull request to an existing fork, then replace MyPw below and add other -e options if needed
WLAN_PW="MyPw"
git clone git@github.com:joba-1/Tasmota.git
cd Tasmota/
cp tasmota/user_config_override_sample.h tasmota/user_config_override.h
sed -i "s/YourWifiPassword/$WLAN_PW/" tasmota/user_config_override.h
sed -i -e's/YourSSID/job.fritz.ssid/' -e 's/your-mqtt-server.com/192.168.1.4/' -e 's/MY_IP/0.0.0.0/' tasmota/user_config_override.h
PLATFORMIO_BUILD_FLAGS=-DUSE_CONFIG_OVERRIDE pio run -e tasmota-sensors -e tasmota-minimal
for f in .pioenvs/*/firmware.bin; do g="${f/\/firmware}"; gzip <"$f" >"/srv/www/htdocs/${g/.pioenvs\/}.gz"; done
for f in .pio/build/*/firmware.bin; do g="${f/\/firmware}"; gzip <"$f" >"/srv/www/htdocs/${g/.pio\/build\/}.gz"; done
Now compiled variants are accessible with the local webserver. If you don't have a webserver running, just do "cd /srv/www/htdocs/ && python3 -m http.server 8000" and you have one.
Longan Nano Bits of Wisdom
use PlatformIO :)
- https://github.com/joba-1/Longan-Nano-Bme280-Spi
- https://github.com/MuellerA/LonganNanoTest/tree/master/SpiDma/src
- https://www.susa.net/wordpress/2019/10/longan-nano-gd32vf103/
- https://github.com/linusreM/Longan-RISC-V-examples
- https://github.com/riscv/riscv-asm-manual/blob/master/riscv-asm.md
- https://github.com/sipeed/platform-gd32v
OpenOcd
Discover board correctly
You see this during upload or debug with sipeed jtag :
Info : JTAG tap: riscv.cpu tap/device found: 0x1000563d (mfg: 0x31e (Andes Technology Corporation), part: 0x0005, ver: 0x1) Warn : JTAG tap: riscv.cpu UNEXPECTED: 0x1000563d (mfg: 0x31e (Andes Technology Corporation), part: 0x0005, ver: 0x1) Error: JTAG tap: riscv.cpu expected 1 of 1: 0x1e200a6d (mfg: 0x536 (Nuclei System Technology Co.,Ltd.), part: 0xe200, ver: 0x1) Info : JTAG tap: auto0.tap tap/device found: 0x790007a3 (mfg: 0x3d1 (GigaDevice Semiconductor (Beijing)), part: 0x9000, ver: 0x7) Error: Trying to use configured scan chain anyway...
- vi ~/.platformio/packages/tool-openocd-gd32v/share/openocd/scripts/target/gd32vf103.cfg
- Change expexted id at the end of line "jtag newtap $_CHIPNAME cpu -irlen 5 -expected-id 0x1e200a6d" to "0x1000563d"
Errormessage should be gone. No idea if it actually changes any behaviour...
Enable Longan-Nano/GD32VF103 reset via jtag adapter
as far as I understand it, the gd32vf103 has no normal way to be reset via jtag. If you upload and debug: all fine. But if you upload and want to run the target without debug: nothing happens. Reset button is not functional. This can be remedied with a manual power cycle, but that is not convenient...
This is a gist provides a solution: https://gist.github.com/elfmimi/1deb9c94b0f0900ae8a9df740b62bcd6
- Replace file ~/.platformio/packages/tool-openocd-gd32v/share/openocd/scripts/target/gd32vf103.cfg with the gist version
- Modify ~/.platformio/platforms/gd32v/builder/main.py: change the whole line containig 'program {$SOURCE}' with ' "-c", "program {$SOURCE} verify reset exit"'
This is the openocd command to flash the Longan Nano, firmware path relative to the project directory:
FW=.pio/build/sipeed-longan-nano/firmware.elf OCD=~/.platformio/packages/tool-openocd-gd32v $OCD/bin/openocd -s $OCD/share/openocd/scripts -f interface/ftdi/sipeed-rv-debugger.cfg -f target/gd32vf103.cfg -c "init; halt;" -c "program $FW verify reset exit"